
Lunar Reconnaissance Orbiter
| Lunar Reconnaissance Orbiter | |
|---|---|
 | |
| COSPAR | 2009-031A |
| Start | 18. června 2009 21:32:00 UTC |
| Kosmodrom | Kennedyho vesmírné středisko Startovací komplex 41 |
| Nosná raketa | Atlas V |
| Typ oběžné dráhy | polární dráha |
| Stav objektu | Na oběžné dráze Měsíce |
| Zánik | Zánik |
| Zánik | ne |
| Provozovatel | NASA |
| Výrobce | NASA |
| Druh | měsíční sonda |
| Mateřské těleso | Měsíc |
| Hmotnost | 1846 kg |
| Délka | 2,62 m |
| Šířka | 2,74 m |
| Výška | 3,86 m |
| Parametry dráhy | |
| Apoapsida | 107 km |
| Periapsida | 73 km |
| Excentricita dráhy | 0,009 4 |
| Přístroje | |
| Nese přístroje | Cosmic Ray Telescope for the Effects of Radiation, Diviner Lunar Radiometer Experiment, Lyman-Alpha Mapping Project, Lunar Exploration Neutron Detector, Lunar Orbiter Laser Altimeter, Lunar Reconnaissance Orbiter Camera a Mini-RF |
| Oficiální web | Oficiální web |
| Některá data mohou pocházet z datové položky. | |
Lunar Reconnaissance Orbiter (LRO) je sonda, kterou americká agentura NASA vyslala v rámci programu Lunar Precursor Robotic Program na oběžnou dráhu kolem Měsíce. Start se konal 18. června 2009[1] a družici do kosmu vynesla raketa Atlas V. LRO je první misí splňující Vizi vesmírného průzkumu (Vision for Space Exploration) deklarovanou americkým prezidentem Georgem W. Bushem v roce 2004.
Záměrem mise je podporovat tuto vizi. Úkolem LRO je mapovat povrch Měsíce a hledat možná místa pro přistání lidské posádky – návrat lidí na Měsíc. Předběžná podoba byla dokončena v únoru 2006 a kritický design byl dokončen v listopadu 2006.
V srpnu 2014 rozhodla NASA o prodloužení mise sondy.[2]
Charakteristika[editovat | editovat zdroj]
Hlavní úkoly mise:
- Globální topografie Měsíce
- Charakteristika vesmírné radiace na orbitě Měsíce
- Polární regiony včetně možných zásob vodního ledu a doby osvětlení
- Mapování při vysokém rozlišení (max 0,5 m), které pomůže v budoucnu vybrat místa pro pilotované přistání
Vývoj probíhal v laboratoři NASA, Goddardově kosmickém středisku. LRO krouží kolem Měsíce po polární dráze a délka hlavní mise měla původně čint jeden rok. Po ukončení hlavní mise měla LRO sloužit jako komunikační družice pro jiné pozemní mise na Měsíci, např. pozemní sondy nebo rovery podobné MER.
Přestože sonda je americká a její start provedla NASA, řídící středisko v Arizonské státní univerzitě má pod kontrolou nejen kameru, ale i interpretaci snímků, a je pod kontrolou mnoha akademických skupin,[3] z nichž některé sídlí mimo spojené státy a nejsou financované americkou vládou (například Německé středisko pro letectví a kosmonautiku).[4] Proto jsou fotografie z roku 2009, na kterých jsou vidět přistávací místa misí Apollo, části měsíčních modulů a vědeckých přístrojů zanechaných na povrchu Měsíce, dokonce i vyšlapané cestičky mezi nimi,[5] používány jako důkaz přistání člověka na Měsíci a k vyvracení konspiračních teorií o přistání Apolla na Měsíci.
Popis sondy[editovat | editovat zdroj]

Sonda nese soubor šesti vědeckých přístrojů a jeden technologický experiment:
- CRaTER – prvotní cíl CRaTERu je charakterizovat globální lunární radiační prostředí a jeho biologické dopady.
- DLRE – měří termální emise měsíčního povrchu
- LAMP – pozoruje povrch měsíce v ultrafialovém pásmu, pátrat po zdrojích ledu.
- LEND – měření, vytváření map, detekce možné podpovrchové zásoby vody.
- LOLA – poskytuje přesný globální lunární topografický model a souřadnicovou síť, která bude sloužit k jeho pochopení.
- LROC – Lunar Reconnaissance Orbiter Camera
- Mini-RF – má demonstrovat nové lehké SAR a komunikační technologie, lokalizuje potenciální vodní led.
Mapování povrchu Měsíce ve vysokém rozlišení umožní spatřit některé větší kusy vybavení, které zde zůstaly od poslední výpravy na Měsíc.
Galerie[editovat | editovat zdroj]
- Snímky z mise Lunar Reconnaissance Orbiter
-
 1. snímek LRO (30. června 2009)
1. snímek LRO (30. června 2009) -
 místo přistání Apolla 11
místo přistání Apolla 11 -
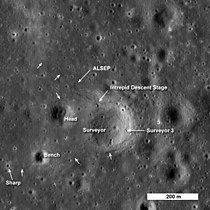 místo přistání Apolla 12 a Surveyoru 3
místo přistání Apolla 12 a Surveyoru 3 -
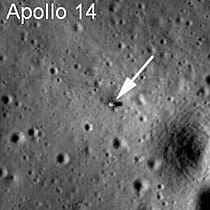 místo přistání Apolla 14
místo přistání Apolla 14 -
 místo přistání Apolla 15
místo přistání Apolla 15 -
 místo přistání Apolla 16
místo přistání Apolla 16 -
 místo přistání Apolla 17
místo přistání Apolla 17 -
 místo přistání Apolla 17
místo přistání Apolla 17 -
 místo přistání Surveyoru 1
místo přistání Surveyoru 1 -
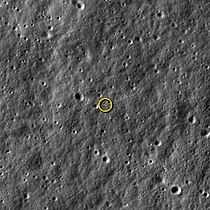 snímek sondy LADEE letící nad povrchem
snímek sondy LADEE letící nad povrchem










- Měsíc
-

-

-
 severní pól
severní pól -
 jižní pól
jižní pól


.jpg)


Odkazy[editovat | editovat zdroj]
Reference[editovat | editovat zdroj]
- ↑ Lunar Reconnaissance Orbiter Launch [online]. [cit. 2009-06-18]. Dostupné v archivu pořízeném dne 2012-03-16.
- ↑ LEONE, Dan. Curiosity, Cassini Among 7 Extended Planetary Missions [online]. Spacenews.com [cit. 2014-09-01]. Dostupné v archivu pořízeném dne 2020-06-02. (anglicky)
- ↑ The LROC Team. www.lroc.asu.edu [online]. Arizona State University [cit. 2022-11-17]. Dostupné online.
- ↑ O nás. Institute of Space Systems [online]. German Aerospace Center [cit. 2022-11-17]. Dostupné online.
- ↑ Nové snímky Měsíce zachytily po desetiletích lidské stopy [online]. [cit. 2009-07-19]. Dostupné v archivu pořízeném dne 2009-07-20.
Související články[editovat | editovat zdroj]
Externí odkazy[editovat | editovat zdroj]
 Obrázky, zvuky či videa k tématu Lunar Reconnaissance Orbiter na Wikimedia Commons
Obrázky, zvuky či videa k tématu Lunar Reconnaissance Orbiter na Wikimedia Commons - (česky) Databáze kosmických sond
- (česky) LRO na mek.kosmo.cz
- (anglicky) LRO na stránkách NASA
- (anglicky) Zprávy o misi na webu NASA