
Elektromotor: Porovnání verzí
odstranění pravděpodobného hoaxu z dubna 2012 značka: editace z Vizuálního editoru |
m link fix značka: editor wikitextu 2017 |
||
| Řádek 1: | Řádek 1: | ||
[[Soubor:Silniki by Zureks.jpg|náhled|350px|Běžné třífázové asynchronní elektromotory]] |
[[Soubor:Silniki by Zureks.jpg|náhled|350px|Běžné třífázové asynchronní elektromotory]] |
||
'''Elektromotor''' je [[elektrický stroj]], který slouží k přeměně [[elektrická energie|elektrické energie]] na mechanickou [[Práce (fyzika)|práci]]. Drtivá většina současných elektromotorů jsou indukční stroje, které využívají silové účinky [[magnetické pole|magnetického pole]]. Bylo by však možné využít i jiné jevy, např. [[piezoelektrický jev]], nebo silové účinky [[elektrostatické pole|elektrostatického pole]]. Současné elektromotory jsou většinou realizovány jako [[ |
'''Elektromotor''' je [[elektrický stroj]], který slouží k přeměně [[elektrická energie|elektrické energie]] na mechanickou [[Práce (fyzika)|práci]]. Drtivá většina současných elektromotorů jsou indukční stroje, které využívají silové účinky [[magnetické pole|magnetického pole]]. Bylo by však možné využít i jiné jevy, např. [[piezoelektrický jev]], nebo silové účinky [[elektrostatické pole|elektrostatického pole]]. Současné elektromotory jsou většinou realizovány jako točivý [[elektrický stroj]]. Méně obvyklé jsou netočivé elektromotory, např. [[lineární elektromotor]]. Elektrické stroje přeměňující [[Mechanická energie|mechanickou práci]] na elektrickou označujeme obecně jako [[Elektrický generátor|generátor]]. Střídavý generátor označujeme jako [[alternátor]] a stejnosměrný jako [[dynamo]]. Většina typů elektrických strojů může pracovat jako motor nebo jako generátor, rozhoduje konstrukce stroje. Některé z těchto strojů mohou samočinně přecházet z motorického do generátorického režimu a naopak z generátorického chodu do motorického. Díky těmto vlastnostem umožňují [[Elektrický pohon|elektrické pohony]] brzdit pomocí [[rekuperace]] tj. vracení elektrické energie do [[Přenosová soustava|elektrické sítě]] nebo do [[akumulátor]]ů. Jako generátory velkých výkonů jsou používány synchronní točivé elektrické stroje – synchronní [[alternátor]]y, na malých vodních elektrárnách jsou používány asynchronní generátory, jako motory jsou nejběžněji používány indukční točivé elektrické stroje – [[asynchronní motor]]y. |
||
== Princip elektromotoru == |
== Princip elektromotoru == |
||
| Řádek 195: | Řádek 195: | ||
== Bezkomutátorové motory == |
== Bezkomutátorové motory == |
||
=== Motory založené na |
=== Motory založené na točivém magnetickém poli === |
||
Motory používající [[točivé magnetické pole]]: |
|||
==== Synchronní stroj ==== |
==== Synchronní stroj ==== |
||
Verze z 7. 3. 2020, 23:06

Elektromotor je elektrický stroj, který slouží k přeměně elektrické energie na mechanickou práci. Drtivá většina současných elektromotorů jsou indukční stroje, které využívají silové účinky magnetického pole. Bylo by však možné využít i jiné jevy, např. piezoelektrický jev, nebo silové účinky elektrostatického pole. Současné elektromotory jsou většinou realizovány jako točivý elektrický stroj. Méně obvyklé jsou netočivé elektromotory, např. lineární elektromotor. Elektrické stroje přeměňující mechanickou práci na elektrickou označujeme obecně jako generátor. Střídavý generátor označujeme jako alternátor a stejnosměrný jako dynamo. Většina typů elektrických strojů může pracovat jako motor nebo jako generátor, rozhoduje konstrukce stroje. Některé z těchto strojů mohou samočinně přecházet z motorického do generátorického režimu a naopak z generátorického chodu do motorického. Díky těmto vlastnostem umožňují elektrické pohony brzdit pomocí rekuperace tj. vracení elektrické energie do elektrické sítě nebo do akumulátorů. Jako generátory velkých výkonů jsou používány synchronní točivé elektrické stroje – synchronní alternátory, na malých vodních elektrárnách jsou používány asynchronní generátory, jako motory jsou nejběžněji používány indukční točivé elektrické stroje – asynchronní motory.
Princip elektromotoru

Elektromotor[1] přeměňuje elektrickou energii na mechanickou, případně také naopak.
Většina elektromotorů je založena na využití silových účinků magnetického pole. Většinou se využívá působení Lorentzova zákona síly. Na vodič protékaný elektrickým proudem, který se nachází v magnetickém poli působí síla úměrná kolmé ortogonální složce magnetické indukce a velikosti elektrického proudu tekoucího vodičem (vektorový součin) (F=B.I.l – jednotky N; T, A, m). V konečném důsledku na sebe silově působí dvě spřažená magnetická pole ve společném – spřaženém magnetickém obvodu (statoru, rotoru a vzduchové mezery).
Zjednodušeně si lze představit, že se využívá vzájemné přitahování a odpuzování dvou elektromagnetů, nebo elektromagnetu a permanentního magnetu. Sílu a polaritu elektromagnetu můžeme řídit velikostí protékajícího elektrického proudu.
Působením elektromagnetické síly na vodič se vodič uvádí do pohybu. Tím současně pohybující se vodič protíná magnetické siločáry v magnetickém poli a ve vodiči indukováno elektrické napětí (U=B.l.v – jednotky V; T, m, m.s−1). Podobně je ve vodidči indukováno napětí ve vodiči, který leží v časově proměnném magnetickém poli, nebo se pohybuje v časově proměnném magnetickém poli. Tento jev se projevuje v brzdovém, motorickém i generátorickém chodu stroje.
Při konstrukci elektromotorů je také využíváno silové působení mezi elektromagnetem a tělesem, které má různé reluktance, tj. různé magnetické odpory (různé permeance, tj. různé magnetické vodivosti). Vyžívána je v reluktančních motorech, kde jsou využívány rozdíly reluktance zubové kotvy (vzduch/zub). Zjednodušeně si lze představit, že v reluktančním stroji je využíváno vzájemné přitahování elektromagnetu a železa.
Zkonstruovat je možné i elektromotory využívající jiné fyzikální principy, např. elektrostatické síly, piezoelektrický jev, nebo přeměnu elektřiny na teplo, ale v současnosti se tyto jevy pro konstrukci elektromotorů téměř nepoužívají.
Elektrický stroj má tři režimy provozu:
- motorický režim – el. stroj odebírá elektrickou energii z elektrického zdroje (el. síť, baterie, generátor) a přeměňuje ji na mechanickou energii na hřídeli. Označuje se jako práce v prvním nebo třetím kvadrantu.
- generátorický režim – el. stroj odebírá na hřídeli mechanickou energii z připojeného mechanického zdroje energie (kinetická, polohová energie, spalovací motor, parní turbína, parní stroj, klika, vrtule větrné elektrárny, …). Mechanická energie je přeměněna na elektrickou energii, která je dodávána do elektrické sítě, do akumulátorové baterie, nebo do připojené elektrické zátěže. Označuje se jako práce v druhém kvadrantu.
- režim brzdy – el. stroj odebírá elektrický výkon z el. zdroje. Odebraný el. výkon působí proti mechanické výkonu na hřídeli, tj. působí proti mechanickému pohybu. Elektrická i mechanická energie je v elektrickém stroji přeměňována na teplo. Teplo se vyvíjí především v kotvě el. stroje, která se značně ohřívá. Proto brzdný režim smí být využíván jen krátkodobě. Označuje se jako práce ve čtvrtém kvadrantu.
Některé stroje, jako je asynchronní stroj, může pracovat v režimu elektrodynamická brzda. Stroje nejsou určeny k dlouhodobému provozu v tomto režimu. Elektrodynamická brzda je používána k elektrickému zpomalení, před zastavením stroje – zkrácení doběhu.
- elektrodynamická brzda – jedná se v podstatě o obrácený motorický režim. Stator je napájen stejnosměrným napětím snížené velikosti a vytváří spřažený magnetický tok stroje, ve kterém se otáčí rotor. Ve vodičích rotoru se indukuje napětí. Vyvolaný proud se uzavírá zkratovanými vodiči rotoru (v kleci). Elektrická energie se mění na teplo v rotoru. Moment výrazně klesá s otáčkami. Elektrodynamická brzda odebírá z vnějšího zdroje poměrně malý výkon.
Konstrukce
Běžný elektrický stroj (elektromotor nebo generátor) je složen ze čtyř základních funkčních celků.
- Elektrický obvod – proudový obvod, je tvořen vinutím – cívkami s izolací, svorkami nebo přípojnicemi. Některé stroje mají komutátor nebo kroužky. Vinutí ve formě cívek (nebo klece) jsou uložena v drážkách magnetického obvodu nebo na pólových nástavcích.
- Komutátor je prstenec složený z mnoha vzájemně izolovaných lamel. K lamelám jsou připojeny jednotlivé vývody cívek kotvy. Ke komutátoru přiléhá dvojice (nebo více) kartáčů. Komutátor dynama slouží jako mechanický usměrňovač indukovaného střídavého napětí a proudu ve vodičích kotvy. Komutátor motoru slouží jako střídač, měnící směr proudu ve vodičích kotvy. V moderních strojích je komutátor nahrazován polovodičovým měničem kmitočtu (BLDC stroje).
- Kroužek má tvar prstýnku na který je připojen el. vývod. Na kroužek dosedá sběrací kartáč. Kroužek nemění směr proudu. Kroužky slouží k elektrickému připojení pohyblivých částí (vinutí). Střídavé (třífázové) elektrické stroje mívají obvykle tři kroužky. Stejnosměrný budící obvod synchronního stroje má dvojici kroužků.
- Magnetický obvod je tvořen feromagnetiky. Magnetický obvod u střídavých strojů a kotev komutátorových strojů (i stejnosměrných) je vždy tvořen vzájemně elektricky izolovanými transformátorovými plechy. Magnetický obvod statorů stejnosměrných strojů bývá opracovaný odlitek.
- Magnetický obvod vede magnetický tok vytvářený vinutím nebo permanentními magnety. Vinutí bývají umístěna v drážkách magnetického obvodu nebo na pólových nástavcích.
- Mechanická konstrukce je tvořena nosnými částmi, ložiskovými štíty, patkami, přírubami, kryty, svorkovnicemi, chlazením. Přenáší reakční síly od hřídele stroje. Zajišťuje dostatečnou mechanickou tuhost a pevnost stroje. Chrání před vniknutím cizích částí a vody do stroje. Zajišťuje oddělení vnějšího a vnitřního prostředí ve stroji (např. nebezpečí výbuchu). Chrání před nebezpečným dotykem pohybujících se částí a dotykem s elektrickými částmi pod napětím = úrazem. Zajišťuje odvod tepelné energie vzniklé ve stroji = chlazení. Mechanická konstrukce stroje má zaručovat, že stroj nebude mechanicky kmitat vlastními kmity.
- Důležitým parametrem (především u rotačních strojů) je délka vzduchové mezery, která má být minimální.
- Chlazení zajišťuje odvod tepla vznikajícího ohmickými ztrátami ve vinutí, ztrátami v magnetickém obvodu vířivými proudy a mechanickými ztrátami v ložiscích. Chlazení může být provedeno jako přirozené, nucené s vlastním ventilátorem, nucené cizím ventilátorem, kapalinové (vodní), plynem (vodík). Překročením provozní teploty izolace dochází k překotnému stárnutí – degradaci izolací. Vlivem vysoké teploty je životnost izolace zkrácena na zlomek předpokládané životnosti. U strojů s permanentními magnety hrozí odmagnetování při překročení Curieho teploty.
Elektrický stroj
Točivý stroj má dvě části:
- Stator je pevná část stroje, která bývá vnější částí stroje. Na statoru bývají upevněny cívky vinutí s magnetickým obvodem, magnety, elektromagnety a kartáče kroužků nebo komutátorů. Některé stejnosměrné stroje mají na statoru umístěny permanentní magnety. Rotor se obvykle otáčí na ložiskách v dutině statoru. Některé konstrukce mají rotor na vnější straně statoru, tj. opačně než obvykle.
- Rotor je otočná část stroje s magnetickým obvodem, vinutím a hřídelí, na které mohou být nasazeny kroužky nebo komutátor. Některé synchonní stroje mají na rotoru permanentní magnety.
Stroj je konstruován tak, aby na sebe vhodně vzájemně působila magnetická pole rotoru a statoru a působením vytvářela kroutící moment. Kroutící moment je přenášen na hřídel stroje. Otáčející se rotor vykonává mechanickou práci. Elektrické točivé stroje jsou obvykle konstruovány tak, že se rotující část stroje nachází obvykle uvnitř statoru. Obrácenou konstrukci mají například stroje, u kterých je požadován zvýšený moment setrvačnosti – například magnetofony napájené napětím o síťovém kmitočtu, gyroskopy.
Stejnosměrný stroj
Stejnosměrný stroj mívá magnetický obvod statoru i s pólovými nástavci zhotoven z plného materiálu. Magnetický tok obvodu je buzen permanentními magnety nebo budicím vinutím. Dále jsou na statoru instalovány držáky kartáčů a ložiskové štíty. Budicí vinutí je k rotoru připojeno sériově, paralelně (derivační), kompaudní (smíšené), cizí buzení, permanentní magnet, … Magnetický obvod rotoru, který nese vinutí připojené na komutátor, je vždy zhotoven z transformátorových plechů. Stejnosměrný stroj je možno, za určitých podmínek konstrukce stroje, napájet ze soustavy sníženého kmitočtu (nedoporučuji zkoušet).
Univerzální komutátorový stroj
Univerzální stroj musí mít magnetický obvod statoru i s pólovými nástavci zhotoven z transformátorových plechů. Magnetický tok obvodu bývá buzen výhradně budicím vinutím, které je (společně s kotvou) připojeno ke společnému zdroji. Budicí vinutí je většinou zapojeno sériově. Rotor se neliší od stejnosměrného stroje. Univerzální stroj pracuje při napájení stejnosměrným i střídavým proudem – odtud univerzální. Univerzální komutátorový stroj je velmi často používán k pohonu drobného přenosného el. nářadí (vrtačky, …).
Střídavý stroj
Třífázový asynchronní stroj ASM je nejrozšířenějším a nejběžnějším typem elektromotoru. Stator nese třífázové vinutí tj. tři stejné cívky vzájemně pootočené o 120° elektrických. Zvláštním případem je jednofázový asynchronní stroj, který má dvě různé cívky vzájemně pootočené o 90° elektrických (hlavní a pomocné vinutí). Třífázový ASM je možno napájet z jednofázové soustavy. Musí být vhodně upraveno zapojení statoru a připojen kondenzátor. Motor pak má nižší mechanický výkon na hřídeli.
Třífázový asynchronní stroj ASM kroužkový. Vinutí rotoru je tvořeno vinutými cívkami, vyvedenými na tři kroužky. Ke kroužkům je přes kartáče připojen obvod regulace proudu rotoru (většinou rezistory). Velké motory jsou vybaveny zkratovačem kroužků s odklápěčem kartáčů. Regulací proudu rotoru (zařazením rezistoru do obvodu rotoru) je možno regulovat posunutí pracovní charakteristiky motoru a skluz. Tím je možno omezit zapínací a rozběhový proud motoru a záběrový moment zvětšit na velikost momentu zvratu.
Třífázový asynchronní stroj ASM nakrátko. Drtivá většina ASM má rotorové vinutí ve tvaru klece, spojené nakrátko. Klec je tvořena masivními tyčemi vloženými do drážek na obvodu magnetického obvodu rotoru. Tyče jsou na čelech vodivě spojeny masivními kruhy. U modernějších motorů je klec za tepla odstříknuta z hliníkové slitiny do drážek rotoru.
U střídavého dvoupólového stroje s jedním pólpárem (jeden severní a jeden jižní pól) platí, že mechanický a elektrický úhel je shodný. Dvoupólové stroje mají synchronní otáčky 3000 min-1/50 Hz. Dvoupólový asynchronní stroj má otáčky asi 2800 min-1/50 Hz.
U vícepólových strojů zůstávají úhly ve stupních elektrických stejné bez ohledu na počet pólů a proto se používají. Mechanický úhel mezi jednotlivými póly jsou podílem úhlu elektrického a počtu pólpárů. Ve stejném poměru se snižují synchronní otáčky stroje. Tabulka uvádí synchronní otáčky stroje pro kmitočet sítě 50 Hz.
| označení | |||||||
| počet pólů | p | 2 | 4 | 6 | … | 30 | … |
| počet pólpárů | 2p | 1 | 2 | 3 | 15 | ||
| synchronní otáčky | ns [min-1] | 3000 | 1500 | 1000 | 200 | ||
| úhel mezi póly | [deg mechanický] | 120° | 60° | 40° | 8° | ||
| úhel mezi póly | [deg elektrický] | 120° | 120° | 120° | 120° | 120° | 120° |
Lineární stroj
Většina běžných elektrických motorů je konstruována na rotačním principu, ale existují i netočivé varianty elektromotorů, například lineární elektromotor, u nějž je stator a rotor stroje rozvinut. Podél pevné pojezdové dráhy je umístěna jedna část motoru. Na pohyblivé části je druhá část motoru. Vzájemné umístění napájeného vinutí a kotvy motoru závisí od konkrétní aplikaci. Tento druh motorů se v technické praxi používá zejména pro některá speciální dopravní zařízení.
Kotva
Rotor komutátorového stroje se nazývá také kotva podle tvaru jeho nejjednodušší konstrukce o minimálním nutném počtu třech vinutí, připojených na všechny tři lamely komutátoru, kdy vystouplé póly tvarem skutečně připomínají lodní kotvu.
Jako kotva bývá označována část motoru, která je napájena pracovním proudem, nebo ta část dynama, která generuje výstupní napětí. Výraz kotva se přeneseně používá i pro rotory jiných (i nekomutátorových) strojů, např. pro asynchronní motor s kotvou nakrátko, nebo dokonce i pro stroje, u kterých se rotor neotáčí uvnitř statoru, ale naopak okolo něj (ventilátory).
Komutátorové stroje

Jeden z prvních rotačních elektromotorů, možná i vůbec první, vynalezl Michael Faraday v roce 1821. Motor se skládal z volně zavěšeného drátu ponořeného do nádrže rtuti. Ve středu nádrže byl umístěn permanentní magnet. Elektrický proud procházel drátem, drát rotující kolem magnetu pak prokazoval, že proud vytvořil kolem drátu točivé magnetické pole.
Moderní motor na stejnosměrný proud byl náhodně objeven v roce 1873, když Zénobe Gramme vodivě spojil roztočené dynamo s druhým stojícím dynamem, z něhož se tím stal napájený motor.
Komutátorový stroj s permanentními magnety s dvoupólovou kotvou
Nejjednodušší komutátorový stroj
Nejjednodušší motor na stejnosměrný proud má stator tvořený permanentním magnetem a rotující kotvu ve formě elektromagnetu s dvěma póly. Rotační přepínač, zvaný komutátor, mění směr elektrického proudu a polaritu magnetického pole procházejícího kotvou dvakrát během každé otáčky. Tím zajistí, že síla působící na póly rotoru má stále stejný směr. V okamžiku přepnutí polarity (mrtvý úhel motoru) udržuje běh tohoto motoru ve správném směru setrvačnost. (Principiálně se tento motor trochu podobá střídavému synchronnímu motoru, kde rotační přepínání směru proudu a jím vytvářeného magnetického pole zajišťuje sama elektrorozvodná síť.) Dvoupólová kotva je používána jen pro výukové účely. V době komutace uhlíků na lamelách komutátoru dochází ke zkratování lamel. Pro motor dojde kezkratování zdroje a pro dynamo ke zkratování kotvy a poklesu výstupního napětí k nule. Prakticky jsou malé levné motorky pro hračky vyráběny se třemi póly a třemi lamelami komutátoru.
Komutátor zajistí, že proud v cívce komutuje (změní směr) + a − (− a +) po každém pootočení o 180° (u dvoupólového motoru). Takto dochází ke změně směru indukčních siločar v cívce.
- Funkce stejnosměrného motoru
-
 Rotor (kotva) je přes oranžový komutátor připojen ke zdroji stejnosměrného napětí. Stator je naznačen dvěma pólovými nástavci. Magnetický tok statoru je buzen elektromagnetem nebo permanentními magnety.
Rotor (kotva) je přes oranžový komutátor připojen ke zdroji stejnosměrného napětí. Stator je naznačen dvěma pólovými nástavci. Magnetický tok statoru je buzen elektromagnetem nebo permanentními magnety. -
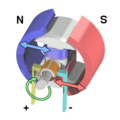 Vzhledem k polaritě statoru a rotoru se souhlasné póly (barvy) odpuzují a opačně pólované póly se přitahují. Vzniklé síly uvádí rotor do pohybu a ten se otáčí.
Vzhledem k polaritě statoru a rotoru se souhlasné póly (barvy) odpuzují a opačně pólované póly se přitahují. Vzniklé síly uvádí rotor do pohybu a ten se otáčí. -
 Rotor se otáčí. V okamžiku, kdy se rotor dostane do polohy, kdy magnetická osa rotoru a statoru splynou a přitažlivé síly dosáhnou maxima, dojde na komutátoru ke komutaci (přepnutí směru) proudu ve vinutí rotoru a tím polarity magnetického pole rotoru. Pokud by nedošlo ke komutaci, tak by se rotor zastavil.
Rotor se otáčí. V okamžiku, kdy se rotor dostane do polohy, kdy magnetická osa rotoru a statoru splynou a přitažlivé síly dosáhnou maxima, dojde na komutátoru ke komutaci (přepnutí směru) proudu ve vinutí rotoru a tím polarity magnetického pole rotoru. Pokud by nedošlo ke komutaci, tak by se rotor zastavil.



Komutátorový stroj buzený permanentními magnety
Magnetický obvod statoru je buzen permanentními magnety, což je jeho výhoda. Nepotřebuje budící vinutí a budící obvody. Nevýhodou je to, že nelze měnit velikost budícího magnetického toku.
Komutátorový motor buzený permanentními magnety nachází použití u všech drobných motorků. Výjimku v současnosti jsou jen speciální případy a motory větších výkonů.
V motorickém chodu je kotva napájena přes uhlíky a komutátor. Napájen může být výhradně ze stejnosměrného zdroje.
Regulace velikosti proudu kotvou umožňuje v motorického chodu změnu momentu. Otáčky výstupního hřídele motoru jsou dány mechanickými ztrátami motoru a zatěžovacím mometem.
Změna směru proudu kotvou umožňuje změnu směru otáčení (reverzaci).
V generátorickém chodu je využíván jako tachodynamo. Polarita udává směr a napětí rychlost otáčení. Tachodynamo má specifické konstrukční vlastnosti.
Motory s permanentním magnetem se dodnes využívají například v modelářství. Jen kotva je minimálně třípólová, aby nevznikal problém s mrtvým úhlem motoru.
Komutátorový stroj cize buzený
První komutátorové stroje měly výhradně statorové budící vinutí, které u nových konstrukcí bývá nahrazováno permanentním magnetem. Cize buzený motor má kotvu (rotor) napájenu z jiného zdroje než buzení (stator). Každé vinutí se řídí zvlášť. Změna směru otáčení motoru je možno reverzací (přepólováním) kotvy, nebo buzení. Pro změnu směru a zavedení elektrodynamické brzdy (brždění protiproudem) stačí jednoduché zapojení obvodů. Obvykle se reverzuje kotva, která má mnohem menší časovou konstantu. Tento motor nepotřebuje šuntování budicího vinutí (buzení má vlastní regulaci). Využíval se po rozvoji výkonové elektroniky (pulzní měniče). Využívá se u českých lokomotiv řady 163, 263, 363.
Derivační (paralelní) komutátorový stroj
Derivační elektromotor má elektromagnet statoru napájený paralelně s rotorem. Jedná se v podstatě o obdobu cize buzeného stroje. Otáčky tohoto motoru jsou méně závislé na zátěži motoru. Proto se tento typ motoru využívá především u strojů, kde jsou požadovány relativně neměnné otáčky. Proud statoru i buzení je možno samostatně regulovat. Změnou směru proudu jen kotvou nebo jen buzením je možno reverzovat otáčky stroje.
Sériový komutátorový stroj
Pro motory větších výkonů motorů se využívá elektromagnetu. Pokud je vinutí statoru (budicí vinutí) spojeno s vinutím rotoru do série, mluvíme o sériovém elektromotoru. Tento typ elektromotoru má točivý moment nepřímo úměrný otáčkám. To znamená, že stojící elektromotor má největší kroutící moment. Využíván byl především u dopravních strojů a v elektrické trakci (vlaky, metro, tramvaje). Ve spojení s generátorem je schopen ideálně nahradit mechanickou převodovku. Současná technika a výkonové frekvenční měniče umožňuje nahradit i pro trakční účely komutátorové motory motory asynchronními, případně i synchronními. V současnoti je dostupnější střídavý třífázový stroj napájený z frekvenčního měniče. Výstupní mechanická charakteristika frekvenčního měniče s třífázovým asynchronním strojem je srovnatelná s výstupní mechanickou charakteristikou sériového elektromotoru. Frekvenční měnič umožňuje navíc rekuperaci. Při stejném výkonu a otáčkách je poměr velikosti i hmotnosti uvedených motorů výhodnější pro asynchronní motor, proto nachází běžně uplatnění u elektromobilů a lokomotiv.
Odbuzený nezatížený sériový komutátorový stroj
S odbuzením nezatíženého stroje hyperbolicky rostou vlastní otáčky stroje, což je nebezpečné: U příliš vysokých rychlostí hrozí mechanické poškození rotoru. Vytržení lamel komutátoru nebo vinutí z drážek rotoru až po úplné roztržení stroje, s podstatným ohrožením majetku a zdraví i životů lidí.
Kompaundní (též sérioparalelní, nebo smíšený) komutátorový stroj
Kompaundní (také kompaudní nebo kompoudní) elektromotor neboli elektromotor se smíšeným buzením má sériové i paralelní budící vinutí, jejichž magnetické toky působí buď souhlasně, nebo proti sobě. Působí-li obě vinutí stejným směrem, má motor větší záběrný moment než motor s paralelním buzením a otáčky se nesnižují tolik jako u motoru se sériovým buzením. Působí-li sériové vinutí proti paralelnímu, udržuje motor otáčky při proměnném zatížení. Zvětší-li se zatížení, otáčky klesnou, sériovým vinutím prochází větší proud, buzení se zesílí a otáčky se opět zvýší. Používá se k pohonu výtahů, bagrů, trolejbusů atd.
Protikompaundní komutátorový stroj
Protikompaudní zapojení se používá u dynam. Magneticky tok sériového vinutí působí proti magnetickému toku paralelního vinutí. Pro obloukové svřování umožňuje naprázno nabuzení derivačním vinutím (zapalovací napětí oblouku). Po zapálení oblouku sériové vinutí odbudí dynamo a tím omezí zkratový proud na žádaniu velikost. U motorů není prakticky použitelné.
Obecné vlastnosti komutátorových strojů
Rychlost motoru na stejnosměrný proud obecně závisí na velikosti napětí a proudu procházejících vinutím motoru a na zátěži neboli velikosti brzdného momentu. Rychlost motoru při daném brzdném momentu je úměrná napětí, točivý moment je úměrný proudu. Rychlost motoru lze regulovat změnou pracovního napětí a buzením.
Výhodou stejnosměrných motorů je relativní jednoduchost a univerzálnost využití. Sériové a derivační motory mohou fungovat nejen na stejnosměrný, ale i střídavý proud nízkých frekvencí. Jsou to tedy motory univerzální. Další výhodou proti motorům střídavým je možnost dosáhnout libovolných mechanicky dosažitelných otáček (motory na střídavý proud mají obvykle otáčky omezeny frekvencí sítě – 50 Hz = 3000 ot./min). Proto tyto motory nacházejí uplatnění v takových strojích, jako jsou vrtačky, mixéry, ale třeba i automobily a dopravní zařízení s elektrickou trakcí (např. lokomotivy, trolejbusy, tramvaje či vozy metra).
Největší nevýhodou stejnosměrných motorů je existence komutátoru, větší velikost a větší hmotnost, pro stejné výkony a momenty, oproti asynchronnímu stroji s frekvenčním měničem. Komutátor je mechanický přepínač, který spíná velké proudy a je – kromě náchylnosti k poruchám – náročný na údržbu a seřízení, jedná se o mechanicky poměrně značně namáhané zařízení vyžadující pravidelnou údržbu či výměnu některých jeho součástí. Jiskření na kartáčcích (tvořených obvykle bloky čistého uhlíku) je zdrojem významného elektromagnetického rušení. S rozvojem levnější a spolehlivější silnoproudé elektroniky (tedy zejména výkonovými tyristory a tranzistory) jsou proto stejnosměrné motory postupně vytlačovány motory s rotujícím magnetickým polem buzeným elektronicky.
Reverzace chodu stejnosměrných motorů
U sériových a derivačních motorů nelze změnit směr otáčení pouhým přepólováním napájecího napětí celého motoru – protože by došlo k přepólování statoru i rotoru, směr otáčení by zůstal zachován. Pro změnu směru je třeba přepólovat jen stator nebo jenom rotor.
Brzdění
Lze brzdit protiproudem, reverzací.
Protože stejnosměrné motory mohou fungovat i jako dynama, lze je využít jako součást elektrodynamické brzdy: Zmenšením vlastních otáček, například nabuzením, stroj přejde z motorického režimu do generátorového.
Bezkomutátorové motory
Motory založené na točivém magnetickém poli
Motory používající točivé magnetické pole:
Synchronní stroj

Rotor stroje je tvořen magnetem nebo elektromagnetem, stator, na nějž je přiveden střídavý proud, vytváří pulzní nebo častěji rotující magnetické pole. Rotor se snaží uchovat si svoji konstantní polohu vůči otáčivému magnetickému poli vytvářenému průchodem střídavého proudu ve statoru, drží se v synchronismu až do kritického kroutícího momentu. Vůči poli statoru si udržuje posuv o úhel podle zátěže (zátěžový úhel beta): Změnou zátěže se úhel změní přechodovým jevem, kývání rotoru, kdy se i cyklicky po určitou dobu (řádově sekundy) pravidelně mění otáčky rotoru. Výkonová zátěžová charakteristika se nazývá V-křivka.
Synchronní alternátory jsou téměř výhradní generátory střídavého proudu do sítě.
Synchronní motory mají řadu nevýhod – je třeba je roztočit na pracovní otáčky jiným strojem nebo pomocným asynchronním rozběhovým vinutím (především rozběh jako hvězda, samotný chod pak zapojen do trojúhelníku). Pokud pod zátěží ztratí synchronizaci s rotujícím polem (překročí se limitní hodnota zátěžového úhlu beta), tak u synchronního motoru skokově klesne jeho výkon a zastaví se. Generátor vypadne ze sychronizmu a zvýší se jeho otáčky. Proto jsou využívány jen ve speciálních případech (např. pohon gramofonu, kdy jsou nevýhody vyváženy požadavkem na pravidelnost otáček o celočíselném násobku frekvence elektrické sítě (za předpokladu, že frekvence napájecí sítě je skutečně konstantní). V současné době se ovšem uplatňují i v pohonu dopravních prostředků.[2] Synchronní stroje bývají provedeny jako asynchronizovaný synchronní stroj, který má na pólech rotoru části klece. Klec může být v některých případech využívána pro rozběh. Motor se robíhá jako asynchronní a až po dosažení otáček blízkých synchronním je pomalu nabuzeno budící vinutí a stroj vklouzne do synchronizmu. Klec při synchronním chodu je nečinná a uplatní se na tlumení mechanických kmitů rotoru.
Ze synchronního motoru se vyvinul krokový motor a střídavý servomotor.
Asynchronní motor
Asynchronní motor má proti synchronnímu jen jinou konstrukci rotoru. Rotor se obvykle skládá ze sady vodivých tyčí, uspořádaných do tvaru válcové klece. Tyče jsou na koncích vodivě spojeny a rotor se pak nazývá „kotva nakrátko“. Tím, že se tyče rotoru (nebo vodiče vinutí rotoru) pohybují v magnetickém poli vytvářeném statorem, se v rotoru indukuje elektrický proud. Frekvence magnetického pole statoru v souřadnicích rotoru je úměrná skluzu, tj. odchylce otáček rotoru od synchronních otáček magnetického pole statoru. Spřažené magnetické pole statoru indukuje v tyčích rotoru napětí. Tyčemi nebo vinutím rotoru protékají indukované proudy, jejichž spřažené magnetické toky volávaji sílu, která otáčí rotorem. Podle principu superpozice stačí pro hrubé odvození momentu uvažovat proudy rotoru a magnetické pole generované proudy statoru, protože samotné magnetické pole rotoru nemůže vyvolat v rotoru točivý moment. Když je rychlost otáčení rotoru rovná rychlosti otáčení magnetického pole statoru, je magnetické pole statoru v souřadnicích rotoru stacionární (tyče rotoru se vůči magnetickému poli statoru nepohybují = skluz je nulový), takže nedochází k indukování napětí v rotoru a točivý moment motoru je nulový. Z toho plyne, že asynchronní motor v ustáleném stavu nedosáhne rotor mechanických synchronních otáček, tj. magnetického pole statoru, daných frekvencí napájecího proudu. Skluz motoru je při jmenovitém zatížení je obvykle v řádu několika procent synchronních otáček. Asynchronní stroj může trvale dosáhnout synchronních otáček jen v případě trvalé dodávky mechanické energie na hřídel stroje z vnějšího stroje. Dodaná energie pokryje mechanické, elektrické a ventilační ztráty stroje. Asynchronní stroj nedosahuje trvale synchronních otáček – proto se nazývá asynchronní motor.
Vzhledem k jednoduché konstrukci, robustnosti a možnosti bezjiskrového provedení je tento druh motoru v praxi nejběžnější, je využíván v mnoha oblastech průmyslu, dopravy i v domácnostech. Výkon asynchronních motorů se pohybuje od několika wattů až do mnoha set kilowattů. Díky poklesu ceny výkonových polovodičů a řídicích systémů nahrazuje postupně tento druh motoru sériový elektromotor, užívaný zejména v pohonech určených pro elektrickou trakci (kolejová vozidla a trolejbusy).
Další druhy motorů
Nejsou zde uvedeny všechny typy motorů. V historii bylo vyvinuto a úspěšně provozováno mnoho typů strojů a sousutrojí. Využívány byly především k regulaci rychlosti a změně směru otáčení. Jsou to například repulzní motor, motor Schrage, motor Winter-Eichberg, soustrojí Ward-Leonard-Illgner a další. V současnosti jsou tyto stroje nahrazovány indukčními stroji s elektronickým řízením otáček (frekvenčními měniči nebo cyklokonvertory). Používány jsou od běžných asynchronních strojů až po synchronní stroje s permanentními magnety ze vzácných zemin. Dnes se dále používá například reluktanční motor, generátor s drápkovou kotvou a další.
Motor se stíněným pólem
Motor se stíněným pólem je druh jednofázového asynchronního motoru (ASM). Vyráběny jsou jen pro malé výkony. Motor je oblíben především pro svou jednoduchost a spolehlivost. Většinou se jedná o dvoupólový stroj.
Konstrukce se vyznačuje tím, že na statoru je jedna cívka navinutá izolovaným vodičem, napájená střídavým napětím síťového kmitočtu. Cívka bývá obvykle rozdělena na dvě stejné části. Pólové nástavce statoru obepínají rotor asi ze 70 %. Z tlustého neizolovaného vodiče je asi na 1/4 pólových nástavců statoru zhotoven jeden nebo dva závity nakrátko. Rotor (kotva) odpovídá běžnému rotoru běžných ASM. Motor se stíněným pólem je využíván především pro pohon malých ventilátorů. Otáčky jsou dány kmitočtem sítě a velikostí zatěžovacího momentu. Princip činnosti: Vinutí statoru vyvolává ve vzduchové mezeře pod pólovým nástavcem spřažený magnetický tok, který po celé ploše pólového nástavce nemá stejný časový průběh. Při nárůstu velikosti toku je opožděn nárust toku pod částí pólových nástavců se závitem nakrátko. Obdobně při poklesu toku, je pod částí se závitem nakrátko opožděn pokles toku. Tím je vytvořeno "pomocné vinutí", jako u běžného jednofázového ASM. Ve vzduchové mezeře vzniká magnetický tok, jehož amplituda se posouvá po obvodu rotoru. Ve výsledku vzniká ve statoru eliptické magnetické pole, které se může blížit kruhovému poli.
Krokový motor
Krokový motor je speciální druh mnohapólového synchronního motoru. Využívá se především tam, kde je třeba přesně řídit nejen otáčky, ale i konkrétní polohu rotoru. Nachází uplatnění v přesné mechanice, regulační technice, robotice a podobných oborech. Krokový motor je unipolární nebo bipolární.
Lineární elektromotor
Lineární elektromotor je mnohapólový motor, jehož stator i rotor je rozvinut do přímky. Využívá se například v dopravě pro pohon vlaků na magnetickém polštáři (Maglev). Používal se pro pohon čtecích hlav starších (převážně sálových) HDD jednotek. V poslední době se lineární motor hojně využívá i pro rozhoupávání zvonů. Na lineárním principu také pracují speciální elektrické stroje určené pro přeměnu elektrické energie na mechanickou energii ve formě zvuku – reproduktory. Další využití je v přesných CNC obráběcích strojích (typicky brusy), kde jemný magnetický pohyb vítězí nad mechanickými převody, jež trpí vůlemi.
Střídavý servomotor
Střídavé servomotory jsou bezkartáčové synchronní motory s permanentními magnety na rotoru a třífázovým vinutím ve statoru. Optimalizovaná konstrukce motoru s použitím nových magnetických materiálů dovoluje až pětinásobné momentové přetížení, a tyto motory jsou proto vhodné pro dynamicky náročné úlohy s nízkou spotřebou, jako je provoz silničních elektromobilů.[zdroj?] Doplněním vhodnou planetovou převodovkou je možno optimalizovat potřebný moment k otáčkám pohonu.
Reference
Literatura
- Ota Roubíček: Elektrické motory a pohony – příručka techniky, volby a užití vybraných druhů, BEN – technická literatura, Praha 2004, ISBN 80-7300-092-X
- Štěpán Berka: Elektrotechnická schémata a zapojení 1, BEN – technická literatura, Praha 2008, ISBN 978-80-7300-229-9, str. 140-171 (zapojení stykačových kombinací pro spouštění elektromotorů)
- Štěpán Berka: Elektrotechnická schémata a zapojení 2, BEN – technická literatura, Praha 2010, ISBN 978-80-7300-254-1, str. 22-60 a 89-143 (zapojení svorkovnic elektromotorů, stykačových kombinací a vačkových spínačů pro spouštění elektromotorů)
Související články
- Stejnosměrný proud
- Střídavý proud
- Elektrický generátor
- Lineární elektromotor
- Reluktanční motor
- Reproduktor
Externí odkazy
 Obrázky, zvuky či videa k tématu elektromotor na Wikimedia Commons
Obrázky, zvuky či videa k tématu elektromotor na Wikimedia Commons - Soubor článků v odborném časopise